Mustafa Almomar
Software Integration Engineer
Software engineer with over 7 years of experience across different automotive domains. Some of the tools I built at Tenneco five years ago remain in use today. As an integrator at Bosch, I led key initiatives such as optimizing CPU utilization and integrating nightly builds for the main project repository. These efforts became essential across teams. I am motivated to close competency gaps from day one and deliver immediate value.
Bosch — Plymouth, MI (October 2020 – July 2025)
Position: Software Integration Engineer
L4 Autonomous Project with USS and Camera Support for Parking Features
- Software Integration & Version Control
- Collaborated with cross-functional teams on end-to-end software integration and release for 16+ vehicle variants, utilizing Git, GitHub, and CI/CD pipelines for robust version control and Conan dependency management.
- Led the definition of feature branching strategies during model year transitions and large-scale feature development, which helped teams maintain code stability and integrate changes efficiently.
- Developed CODEOWNERS scripts that defined and enforced code ownership policies in the main repository, requiring designated team approval for all pull requests. This streamlined the review process and maintained a high standard of code quality.
- CI/CD & Automation
- Enhanced Jenkins smoketest pipelines and associated nodes, ensuring comprehensive software validation and nightly build reliability.
- Proactively debugged failed Jenkins jobs and resolved commit conflicts to maintain smooth CI/CD operations, while developing test cases to improve traceability and repository health.
- Worked with unit tests, debugged pipelines executing unit tests, and ensured unit test logs were included and passed as part of the release artifacts for each software delivery.
- Builds & Dockerization
- Utilized Docker to standardize OneParking builds, accelerate debugging, and streamline deliveries to internal and OEM teams.
- Orchestrated full software release execution, preparing all required artifacts (e.g., binaries, QAC reports, test results, documentation) and assigning security keys for distribution.
- HIL Validation & Bench Setup
- Built and maintained integration Hardware-in-the-Loop (HIL) benches across multiple regions, authoring setup scripts and shared GitHub repositories for consistent environment deployment and replication.
- Utilized CANoe and HIL environments for scenario simulation, CAN bus debugging, and pre-release validation.
- Led runtime optimization topics for NRCS & Parking ECUs, decreasing CPU utilization from 97% to 84%, enabling new ADAS features such as trailer assist and significantly improving rendering.
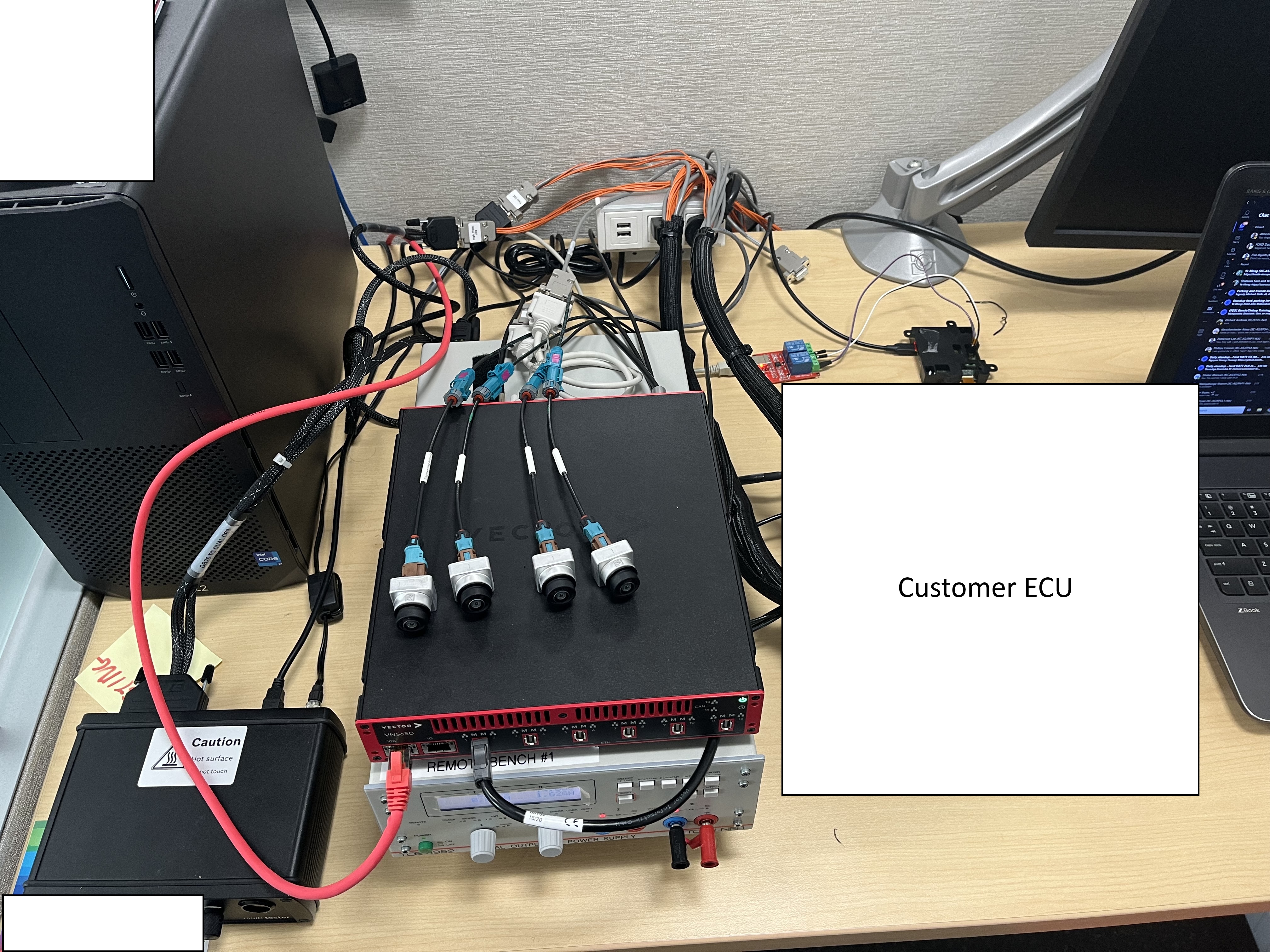
- Remote Testing Infrastructure
- Deployed remote testing infrastructure during COVID, utilizing Python scripting to control power supplies, USS boxes, and Vector hardware, thereby enabling remote flashing and validation for distributed global teams.
- Successfully replicated complex field bugs in bench environments to facilitate accurate resolution of in-field product bugs.
- Code Quality & Compliance
- supported Coverity integration to ensure MISRA compliance across OneParking modules.
- Led keyword scan efforts to guarantee customer-specific feature configuration and software build integrity.
- Collaboration & Release Management
- Collaborated closely with system engineers, function owners, and validation teams to support requirement verification and achieve release readiness.
- Supported calibration engineers with End-of-Line (EOL) processes, directly participating in vehicle testing to ensure accurate and time-efficient camera calibration execution.
- Trained new cross-functional teams on product flashing procedures and common faults, utilizing team meetings and comprehensive wiki documentation. Served as a technical expert for target flashing, recognized for deep product knowledge.
- Proactively resolved critical build issues under tight deadlines and managed timely software releases to driving and validation teams.
- Maintained comprehensive integration documentation, release notes, and change logs for enhanced traceability and debugging efficiency.



STLA NRCS and Parking Project
Education
- B.S. in Computer Science Engineering – University of Toledo